

10月24日,零次方科技發布了其首款人形機器人,代號為Z1。該機器人可以在多種不規則路面、復雜地形中長時間穩定行走,且具備優秀的抗干擾性能,即使受到各方向的強沖擊也能保持穩定站立。
視頻中的Z1通過觀察人類的行為動作,模仿學習攻擊招式,以靈活的全身協同控制能力為基礎,進行動態防御。攻擊、躲避、平衡,兩個人形機器人展示了一場別開生面的機器人格斗比賽。
作為零次方首款雙足人形機器人,Z1配備最高150Nm關節電機,全身具備27個自由度,載重測試極限高達20kg,負載/自重比超70%。其搭載了自研的EtherCAT通訊模組,整體系統實現低延時高帶寬;而Z1在設計之初與眾不同的是,團隊采用AI技術輔助進行機器人的結構參數設計,實現了更低的能耗(COT)與更高的動態運動性能。其結合自研的物理交互世界模型算法進行運動控制,能夠實現出色的抗干擾能力以及各種復雜工況的適應和復雜地形的行走能力。
視頻中還出現了和電影《鋼甲鐵拳》呼應的畫面,機器人完美復刻了人類的雙臂動作。
零次方創始人閔宇恒表示,計劃于今年年底,在無機器人操作設備的情況下進行激情澎湃的人形機器人拳擊比賽,實現每個人的機甲夢。而這項技術正是零次方團隊在今年9月中旬發布的雙臂機器人F1展示過的,團隊的算法核心之一: 基于人類視頻數據學習(learn from hunman video)

為什么要基于人類視頻數據學習?
零次方團隊認為, 數據量是實現通用具身操作的必需因素,單位數據成本是產品落地的基礎條件 。
近年來,Scaling Law這一詞語被多次提及。大語言模型以及特斯拉自動駕駛的Scaling Law也給具身操作領域帶來了一定的啟發。團隊認為,實現具身智能的路徑無論是基于多模態大模型,還是通過構建高維世界模型亦或是組合專有領域小模型,無法規避的一點核心就是海量的優質數據。
當前,機器人需要的數據分為三層:第一層是真實的遙操數據,第二種是高質量的仿真合成數據;第三種是人類行為數據,最大的來源是互聯網視頻。
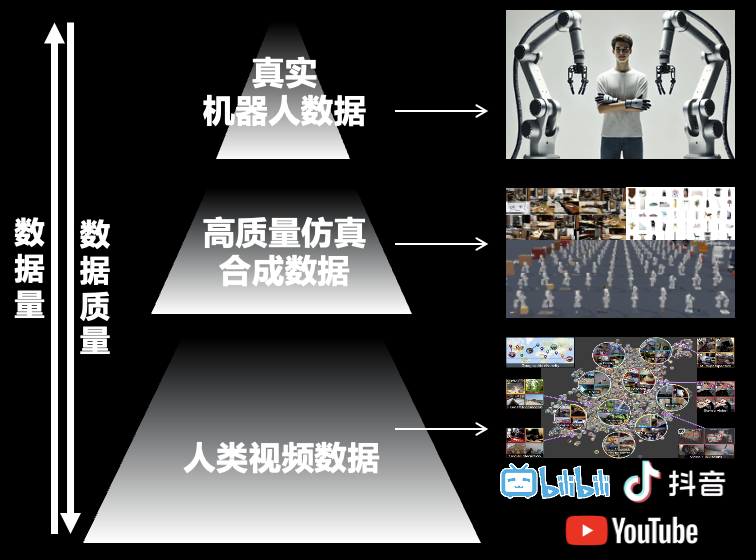
這三層數據的質量由高到低,但不論是真實的遙操數據,還是仿真數據,都面臨單位成本高的問題。人類數據的質量最低,但量也是最大的。所以零次方的技術路徑主要解決的問題是:如何利用海量的人類視頻數據
如何向人類學習?

據了解,有別于當前主流的遙操作技術,零次方科技致力于通過三維人體運動姿態感知模型提取人類關鍵關節的運動數據,并重映射到機器人身上,而無需人類適應義肢一樣使用遙操作設備的學習成本。并且,通過4D高斯濺射技術來重建機器人所需觀測信息,最終采用完整的數據訓練一個Transformer-Based Diffusion Policy,從而驅動機器人自主完成任務,使其具備直接向人類學習的能力。

基于向人類學習的方式(LFWH),機器人可以構建 base model。在此基礎上,能夠在仿真訓練中進行強化學習,實現更加靈活泛化的操作,以彌補機器人與人之間的先天性結構差異,進而超越人類專家的工作效率,并實現快速部署。
快速部署之后,機器人可根據專項場景的數據以及互聯網數據,訓練想象生成模型(Imaginator)。通過Imaginator基于初始狀態量生成指定任務的plan,再將生成數據和真實數據混合使用。

隨著imaginator能力的提升,所需的真實數據逐漸減少,生成數據的比例越來越高,算法的泛化性也隨之增強,部署效率因此提高,從而實現數據飛輪效應。最終,Imaginator的想象能力越來越逼近真實,內含無限逼近現實物理規律的世界模型,達到未卜先知,實現真正的通用人工智能。屆時人形機器人將走出工廠,走進千家萬戶,提高人們生產生活的效率。
瞄準制造業產業升級,為中小企業實現降本增效
當前,中國勞動力密集企業有34萬家,占制造業比重32%,就業人口近5700萬;伴隨著人口出生率的下滑,疊加人口老齡化,每年差不多有50萬工人的空缺,這個缺口還在進一步拉大。與之并行的是,成本攀升和勞動力人員流動過大,無法滿足當前中小型企業資金少、非標制造和市場需求大帶來的柔性制造等痛點。
傳統的自動化解決方案存在幾個問題:一是量太少,不足以支撐改造成本;二是產線比較固定,缺乏柔性,無法改變生產內容,即柔性生產。而協作機械臂的問題在于,部署很難,需要專業人士先進行一周甚至更長時間的調試,用手動編程的方式來實現對機械臂的部署。專業工程師成本高,數量少,中小企業布置一條產線的成本,甚至高于其業務利潤。
針對中小企業工廠改造難,手動編程等問題,零次方的解決方案是,用機器人自主學習實現原位替代,即以完全仿人的設計,把對應的功能實現替換,不需要改變布局,也不需要編程,就能直接實現“機器學習人的操作,并進行快速部署”,且通過這種持續學習的能力,不斷填入數據,以增強機器人在場景方面的泛化能力。
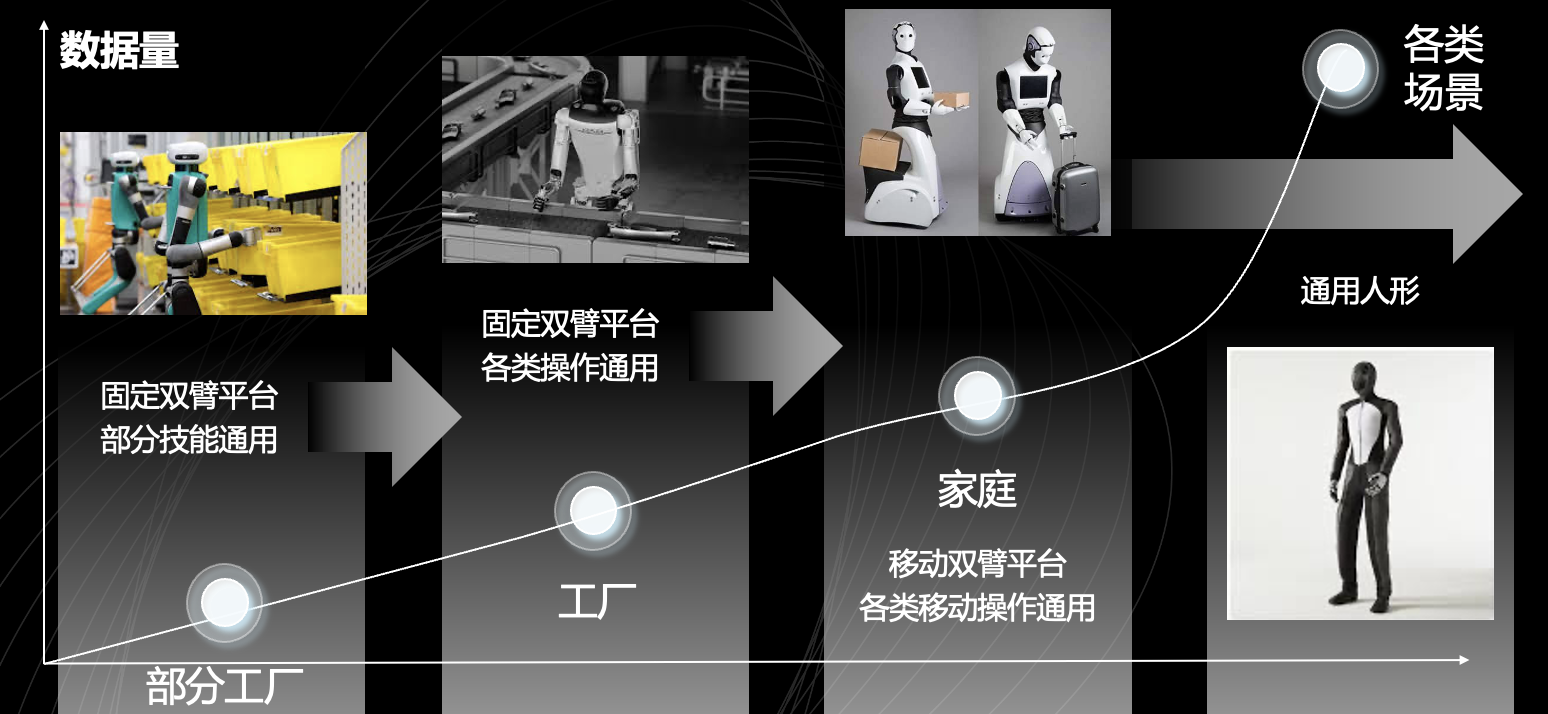
零次方團隊表示,現階段,F1將先被用于專業工廠的專項操作,逐步拓展場景,推動數據飛輪滾動,將模型變得更具泛化性,屆時再過渡到更加柔性的家庭場景,最終實現對通用場景的覆蓋。
清華&江淮孵化,00后極客團隊創業

「零次方」由清華大學和江淮前沿技術協同創新中心共同孵化,團隊主創成員來自于 清華大學 AI&Robot智能 機器人實驗室 ,在機器人操作及運動控制領域成果突出,發表了數篇TRO、CoRL、ICRA、IROS機器人頂刊論文。團隊中同樣有來自字節跳動、百度等互聯網大廠、節卡等協作機器人公司的業內專業人士,在解決最前沿的科研學術問題、將創新技術轉化為商業落地產品方面經驗豐富。

「零次方」團隊成立于2024年5月,并在短短4個月的時間里完成了兩款人型機器人產品,以業內遙遙領先的速度持續創新,立志在三年內實現“人能走的路機器人基本都能走,人能干的活機器人基本都能干”。
閔宇恒表示, 任何非0實數的0次冪都等于1,而0的零次方卻無法定義。「零次方」旨在做最本質的創新,擁抱無限可能,實現從零到一。



















我要評論